پژوهشگران علوم کامپیوتر و هوش مصنوعی دانشگاه ام آی تی موفق به طراحی یک ربات کنترل شونده شدند که سیگنال های ماهیچه ای و مغزی را دریافت کرده و با دقت بالایی وظایف خود را انجام میدهند.
![]()
پژوهشگران آزمایشگاه علوم کامپیوتر و هوش مصنوعی دانشگاه ام آی تی با نام اختصاری (CSAIL) به تازگی پیشرفتهای چشمگیری را در حوزه رباتیک کسب کردهاند و در آخرین پروژه خود رباتهای اریگامی مجهز به هوش مصنوعی را توسعه دادهاند که قابلیت حس کردن افراد از پشت دیوار را دارند. در جدیدترین پروژه آنها میتوان ربات، را تنها با نگاه کردن به آن کنترل کرده و در صورت اشتباه در عملکرد آن می توان با یک اشاره ساده انگشت، آن اشتباه را اصلاح کرد.
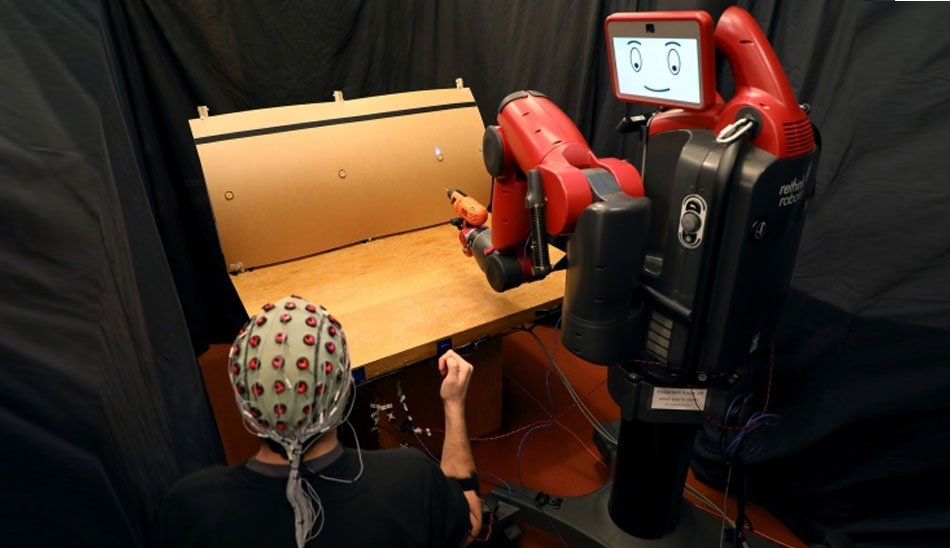
این تیم نتایج تحقیقات خود را در قالب فیلمی کوتاه ارائه کرد که در آن شخصی ربات کنترل شونده را راهنمایی میکند و ربات توسط مته سوراخهایی را بر روی یک تخته ایجاد کند. این رابط سبب میشود که ربات کارهایی شبیه انسان انجام دهد بدون آنکه قبلا تمرین کرده باشد.
زمانی که شخص متوجه اشتباهی در عملکرد ربات میشود، حسگرهای مغز به سرعت تشخیص میدهند. در نتیجه با اشاره انگشت، ربات درمییابد که باید کار خود را اصلاح کند. دانیلا راس رئیس این تیم تحقیقاتی میگوید: «دو حسگر که با هم کار میکنند امکان پاسخ تقریبا سریع را فراهم کردهاند.»
راس می گوید: «این کار تحقیقاتی با ترکیب بازخوردهای EEG و EMG برهم کنش های انسان-ربات را برای کاربردهای گستردهتری نسبت به آنچه در گذشته تنها با استفاده از بازخورد EEG انجام میگرفت تقویت کرده است.»
او همچنین میافزاید: «با افزودن بازخورد ماهیچهای میتوان دستورات حرکتی در محیط سه بعدی را با ظرافت و دقت بسیار بالاتری به ربات ارسال کرد.»
کنترل چنین رباتی فقط به کمک مغزتان نیاز به این دارد که یاد بگیرید چگونه فکر کنید تا حسگرها بتوانند فرمانها را به درستی تشخیص دهند. این امر نیاز به یک محیط آزمایشگاهی تحت کنترل توسط یک اپراتور حرفهای دارد. حال تصور کنید که این کار در یک ساختمان شلوغ چقدر دشوار خواهد بود.
هر کسی میداند که بینظمی و شلوغی چقدر تمرکز فرد را به هم میزند. در این پروژه، اسکنرهای امواج مغز به سرعت سیگنال های موسوم به «پتانسیل های خطا» یا به صورت مختصر ErrP ها را تشخیص میدهند. این سیگنالها به طور طبیعی زمانی اتفاق میافتند که شخص متوجه اشتباهی میشود. یک ErrP سبب میشود که ربات، متوقف شده و بنابراین در هنگام نیاز اپراتور میتواند عملکرد ربات را اصلاح و هدایت کند.
ژوزف دلپرتو نویسنده اصلی مقاله مربوط به این تحقیقات میگوید: «جالب ترین بخش این رویکرد این است که نیاز به این نیست که کاربران تمرین های خاصی در مورد نحوه فکر کردن داشته باشند. ربات خودش را با شما سازگار خواهد کرد و نیاز به کار خاصی نیست.»
در این مطالعه، ربات Baxter با دقت 70 درصد توانست نقاط مد نظر را مته کند. اما با نظارت انسانی، این مقدار به 97 درصد رسید.
دلپرتو همچنین میافزاید: «با داشتن همزمان سیگنال های ماهیچه ای و مغزی، ما میتوانیم در مورد حرکت های طبیعی یک شخص و تصمیمات آنی او درباره یک اشتباه خاص اطلاعات بیشتری به دست آوریم. این امر سبب ارتباط بیشتر با ربات همانند ارتباط با انسان میشود.»
کلام آخر
برای اخبار بیشتر از دنیای هوش مصنوعی و رباتیک با پلازا همراه بمانید، شما همچنین میتوانید در بخش نظرات، دیدگاه خود را با ما به اشتراک بگذارید.
