تماشای پرواز هماهنگ پهپادها جذابیتهای خاص خود را دارد و هر از چندگاهی چنین نمایشهایی توسط برخی شرکتها به اجرا در میآید. البته تاکنون به صف درآوردن این تجهیزات پرنده و کارکرد هماهنگ آنها وابسته به کاربرد تکنولوژیهایی نظیر GPS یا سیستمهای موشن کپچر بوده است. اما به تازگی روشی ابداع شده که بدون وجود چنین تکنولوژیهایی نیز امکان پرواز هماهنگ پهپادها را میسر میکند.

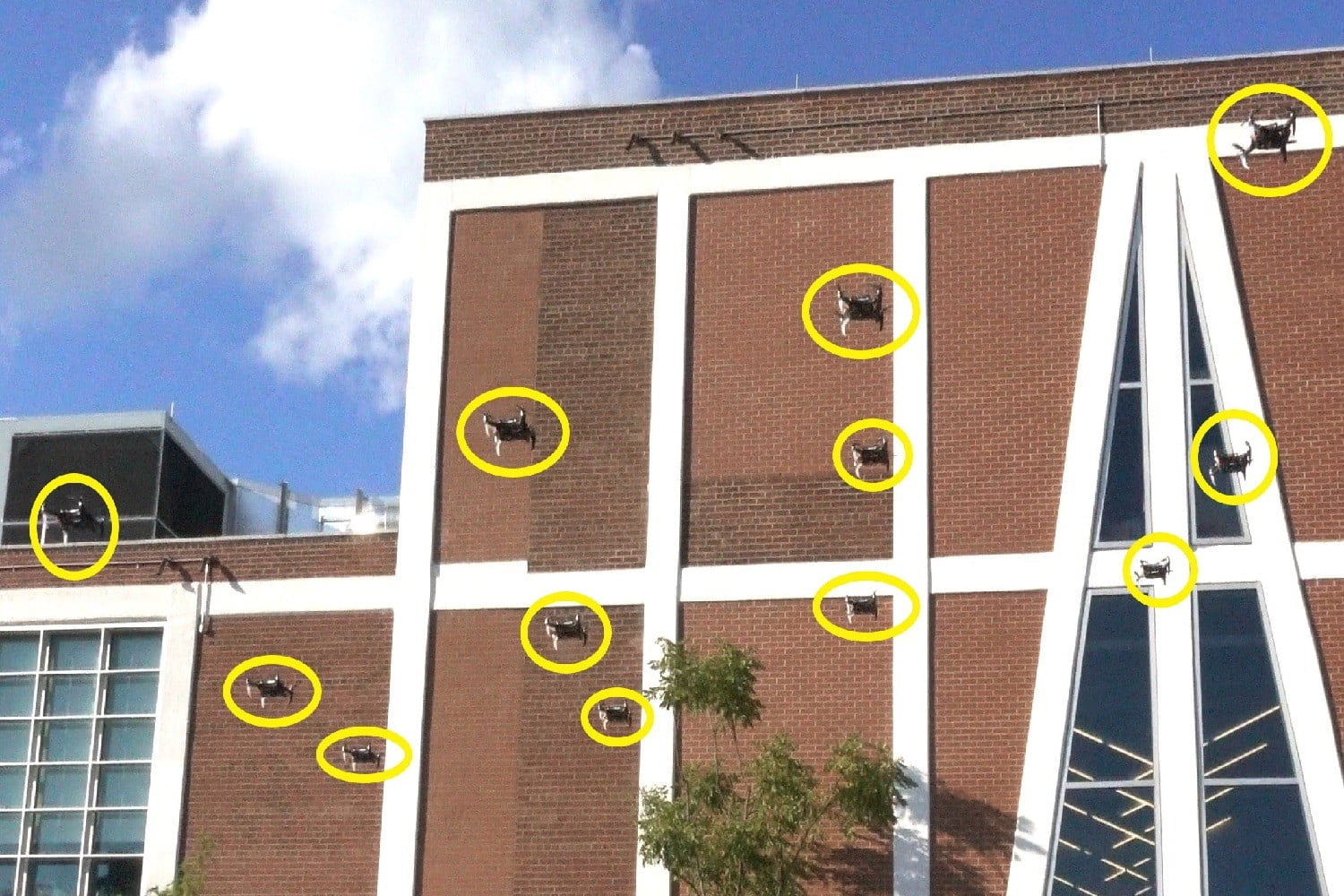
محققین دانشگاه پنسیلوانیا روشی را توسعه دادهاند که تنها با استفاده از یک دوربین رو به پایین با میدان دید 160 درجه و یک IMU ساده (ماژولی مجهز به سنسورهای ژیروسکوپ ، شتابسنج و حرکتسنج) میتوان یک دوجین پهپاد چهار ملخه را به صورتی دسته جمعی و هماهنگ به پرواز در آورد. نتیجهی کار این محققین بزرگترین پرواز هماهنگ پهپادها بدون بهرهگیری از GPS یا موشن کپچر را پدید آورد و رکورد جدیدی در این زمینه را به ثبت رساند.
به گفتهی دکتر «جوزپه لویانا» یکی از محققین این پروژه : «راهکار ارائه شده توسط ما ساده و ارزان است و در مقیاسهای مختلفی قابلیت پیادهسازی دارد. در واقع ما به این وسایل پرنده اجزایی را اضافه کردیم که بدون بر جای گذاشتن تاثیر منفی روی عملکرد آنها امکان برنامهریزی و کنترل حرکت پهپادها (تا سقف 12 دستگاه) و حتی رهیابی خودکار آنها در شرایط محیطی مختلف را فراهم میکند. آرمان ما این است که در آینده امکان به پرواز در آوردن هماهنگ پهپادها بدون استفاده از سیستمهای گران موشن کپچر و یا در مناطق خارج از پوشش GPS برای همگان محقق شود».
در این روش ابداعی هر کدام از پهپادهای حاضر در گروه، محل دقیق قرارگیری خود را یافته و اطلاعات آپدیت شده را به یک ایستگاه زمینی میفرستند و با توجه به این اطلاعات دریافتی، فرمان لازم برای حرکت دسته جمعی آنها صادر میشود. در واقع این پهپادها از اینکه در داخل یک گروه و به صورت هماهنگ در حال حرکت هستند آگاهی ندارند اما مادامی که از فرمانهای صادره پیروی میکنند حرکت منظم و هماهنگ آنها حفظ میشود. در این سیستم امکان کم یا زیاد کردن تعداد پهپادها بدون اینکه خللی در هارمونی ایجاد شود نیز وجود دارد.
پژوهشگران در حال حاضر به دنبال بهینه سازی این سیستم از جنبههای مختلفی چون کاهش انحراف پهپادها از مسیر خود، افزایش انعطاف پذیری در حرکت، افزایش خودآگاهی پهپادها نسبت به محیط پیرامون خود و امکان پرواز در مکانهای ناشناخته هستند.